

Vetores no espaço como representar graficamente, aplicações, exercícios
- 3931
- 131
- Mr. Reginald Lindgren
A vetor no espaço Tudo é representado por um sistema de coordenadas dado por x, e e z. Quase sempre o avião XY É o plano da superfície horizontal e do eixo z representa a altura (ou profundidade).
Os eixos de coordenadas cartesianas mostradas na Figura 1, dividem o espaço em 8 regiões chamadas Ictaves, análogo a como os eixos x - e Divida o avião em 4 quadrantes. Teremos então 1 octante, 2º Ocanto e assim por diante.
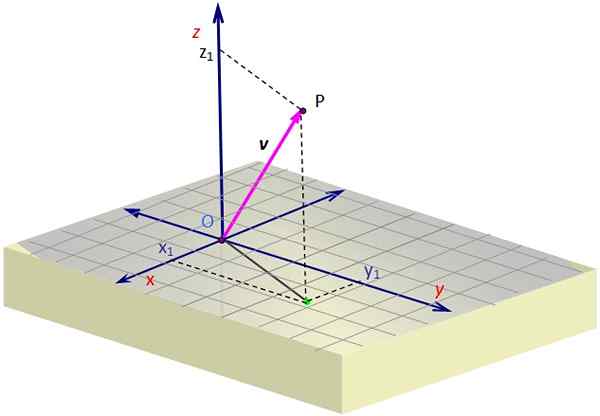
figura 1. Um vetor no espaço. Fonte: Self feito. A Figura 1 contém uma representação de um vetor v No espaço. É necessária alguma perspectiva para criar a ilusão de três dimensões no plano da tela, o que é alcançado desenhando uma visão oblíqua.
Para representar graficamente um vetor 3D, você deve ajudar as linhas pontilhadas que determinam as coordenadas da projeção ou "sombra" da grade v Sobre a superfície x e. Esta projeção começa em O e termina no ponto verde.
Uma vez lá, você deve continuar na vertical até a altura (ou profundidade) necessária de acordo com o valor de z, Até você chegar a P. O vetor é retirado de O e terminando em P, que no exemplo está no 1º octante.
[TOC]
Formulários
Os vetores no espaço são amplamente utilizados em mecânica e outros ramos da física e da engenharia, uma vez que as estruturas que nos cercam exigem geometria nas três dimensões.
Vetores de posição no espaço são usados para posicionar objetos em relação a um ponto de referência chamado origem QUALQUER. Portanto, eles também são ferramentas necessárias na navegação, mas isso não é tudo.
Pode servir a você: Ondas eletromagnéticas: Teoria Maxwell, Tipos, CaracterísticasAs forças que atuam em estruturas como parafusos, suportes, cabos, suportes e muito mais são a natureza vetorial e são orientados no espaço. Para saber seu efeito, é necessário conhecer seu endereço (e também seu ponto de aplicação).
E freqüentemente a direção de uma força é conhecida por dois pontos no espaço que pertencem à sua linha de ação. Dessa maneira, a força é:
F = F ou
Onde f é a magnitude ou módulo de força e ou É o vetor da unidade (módulo 1) direcionado ao longo da linha de ação de F.
Notação e representações vetoriais 3D
Antes de resolver alguns exemplos, a notação de vetores 3D será revisada brevemente.
No exemplo da Figura 1, Vector V, cujo ponto de origem coincide com a origem ou e cujo final é o ponto P, tem coordenadas x e z positivo, enquanto coordena e É negativo. Essas coordenadas são: x1, e1, z1, que são precisamente as coordenadas de P.
Portanto, se tivermos um vetor ligado à origem, ou seja, cujo ponto de partida coincide com O, é muito fácil indicar suas coordenadas, que serão as do ponto extremo ou p. Para distinguir entre um ponto e um vetor, usaremos as mais recentes letras e suportes em negrito, como este:
v = < x1, e1, z1 >
Enquanto o ponto P é indicado com parênteses:
P = (x1, e1, z1)
Outra representação faz uso de vetores de unidade Yo, J e k que definem as três direções do espaço nos eixos x, e e z respectivamente.
Esses vetores são perpendiculares um ao outro e compõem um Base Ortonormal (Veja a Figura 2). Isso significa que um vetor 3D pode ser escrito em termos deles como:
Pode servir a você: movimento ondulado: características, tipos de ondas, exemplosv = vx Yo + ve J + vz k
Ângulos e diretores de Cosenos de um vetor
A Figura 2 também mostra os ângulos γ dos diretores1, γ2 e γ3 do que o vetor v respectivamente com os eixos x, e e z. Conhecendo esses ângulos e a magnitude do vetor, isso é completamente determinado. Além disso, os cossenos dos diretores cumprem o seguinte relacionamento:
(cos γ1)2 + (cos γ2)2 + (cos γ3)2 = 1
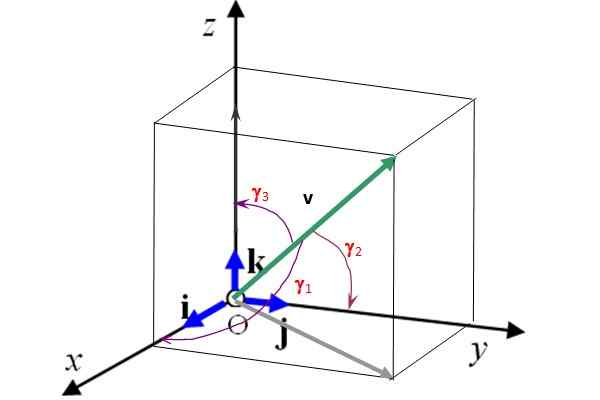 Figura 2. Vetores unitários i, j e k determinam as 3 direções preferenciais do espaço. Fonte: Self feito.
Figura 2. Vetores unitários i, j e k determinam as 3 direções preferenciais do espaço. Fonte: Self feito. Exercícios resolvidos
-Exercício 1
Na Figura 2, os ângulos γ1, γ2 e γ3 do que o vetor v do módulo 50 de forma com os eixos de coordenadas são respectivamente: 75.0º, 60.0º e 34.3º. Encontre os componentes cartesianos deste vetor e represente -o em termos de vetores da unidade Yo, J e k.
Solução
A projeção do vetor v no eixo x é vx = 50 . Cos 75º = 12.941. Da mesma forma, a projeção de v no eixo e é ve = 50 cos 60 º = 25 e finalmente no eixo z é vz = 50. cos 34.3º = 41.3. Agora v pode ser expresso como:
v = 12.9 Yo + 25.0 J + 41.3 k
-Exercício 2
Encontre tensões em cada um dos cabos que mantêm o balde da figura que está em equilíbrio, se o peso disso for 30 n.
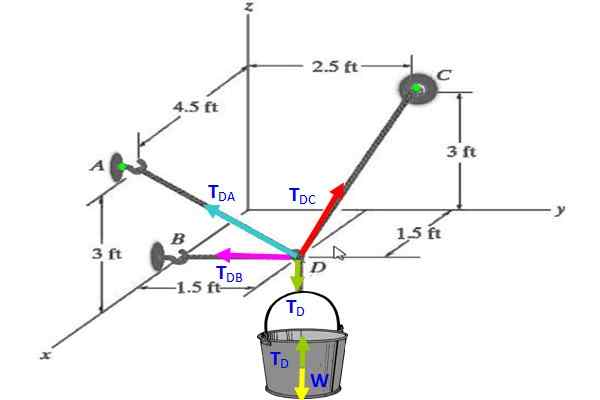 Figura 3. Diagrama de tensões para o Exercício 2.
Figura 3. Diagrama de tensões para o Exercício 2. Solução
No balde, o diagrama do corpo livre indica que TD (verde) compensa o peso C (amarelo), portanto tD = W = 30 n.
No nó, o vetor TD É direcionado verticalmente para baixo, então:
TD = 30 (-k) N.
Para estabelecer as tensões restantes, você deve seguir as seguintes etapas:
Etapa 1: encontre as coordenadas de todos os pontos
A = (4.5; 0; 3) (A está no avião da parede X-Z)
B = (1.5; 0; 0) (B está no eixo x)
Pode atendê -lo: endereço (físico)C = (0, 2.5, 3) (C está no plano da parede e z)
D = (1.5; 1.5; 0) (D está no plano horizontal x e)
Etapa 2: encontre os vetores em cada direção subtraindo as coordenadas do fim e o começo
Dá =
DC =
DB =
Etapa 3: Calcule módulos e vetores de unidade
Um vetor de unidade é obtido por expressão: ou = r / r, com r (em negrito) sendo o vetor e r (sem negrito) o módulo do referido vetor.
Da = (32 + (-1.5)2 + 32)½ = 4.5; Dc = ((-1.5) 2 + 12 + 32)½ = 3.5
ouDá = 4.5 =
ouDC = 3.5 =
ouDB =
ouD =
Etapa 4: Expresse todas as tensões como vetores
TDá = TDá ouDá = TDá
TDC = TDC ouDc = TDC
TDB = TDB ouDB = TDB
TD = 30
Etapa 5: aplique a condição de equilíbrio estático e resolva o sistema de equações
Finalmente, a condição de equilíbrio estático é aplicada ao balde, para que a soma vetorial de todas as forças no nó seja anulada:
TDá + TDC + TDB + TD = 0
Como as tensões estão no espaço, isso levará a um sistema de três equações para cada componente (x, e e z) de tensões.
0.67 tDá -0.43 tDC + 0 tDB = 0
-0.33 tDá + 0.29 tDC - TDB = 0
0.67 tDá + 0.86 tDC +0 tDB - 30 = 0
A solução é: tDá = 14.9 n; TDá = 23.3 n; TDB = 1.82 n
Referências
- Bedford, 2000. PARA. Mecânica para engenharia: estático. Addison Wesley. 38-52.
- Figueroa, d. Série: Física para Ciência e Engenharia. Volume 1. Cinemática.31-68.
- Físico. Módulo 8: vetores. Recuperado de: FRTL.Utn.Edu.ar
- Hibbeler, R. 2006. Mecânica para engenheiros. Estático. 6ª edição. Empresa editorial continental. 15-53.
- Vetor da calculadora de adição. Recuperado de: 1728.org