

Características e propriedades vetoriais, elementos, tipos, exemplos
- 4264
- 146
- Melvin Mueller
O vetores São entidades matemáticas que têm uma magnitude -positiva -, geralmente acompanhada por uma unidade de medida, além de direção e significado. Tais características são muito apropriadas para descrever quantidades físicas, como velocidade, força, aceleração e muito mais.
Com vetores, é possível executar operações como soma, subtração e produtos. A divisão não é definida para vetores e, quanto ao produto, há três classes que descreveremos mais adiante: produto escalar ou de ponto, vetor ou produto cruzado e produto de um escalar para um vetor.
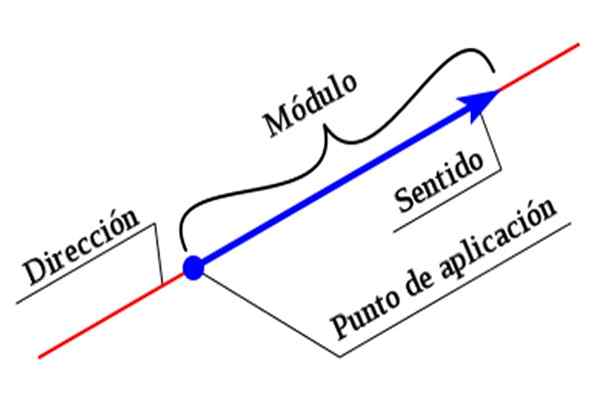 figura 1. Os elementos de um vetor. Fonte: Wikimedia Commons.
figura 1. Os elementos de um vetor. Fonte: Wikimedia Commons. Para descrever completamente um vetor, é necessário indicar todas as suas características. A magnitude ou módulo é um valor numérico acompanhado por uma unidade, enquanto a direção e o significado são estabelecidos com a ajuda de um sistema de coordenadas.
Vejamos um exemplo: suponha que um avião voe de uma cidade para outra à taxa de 850 km/h na direção. Aqui temos um vetor completamente especificado, porque a magnitude está disponível: 850 km/h, enquanto a direção e o significado são ne.
Os vetores geralmente são representados graficamente por segmentos de linha orientados, cujo comprimento é proporcional à magnitude.
Embora para especificar a direção e o significado, é necessária uma linha de referência que geralmente é o eixo horizontal, embora o norte também possa ser tomado como referência, esse é o caso da velocidade do plano:
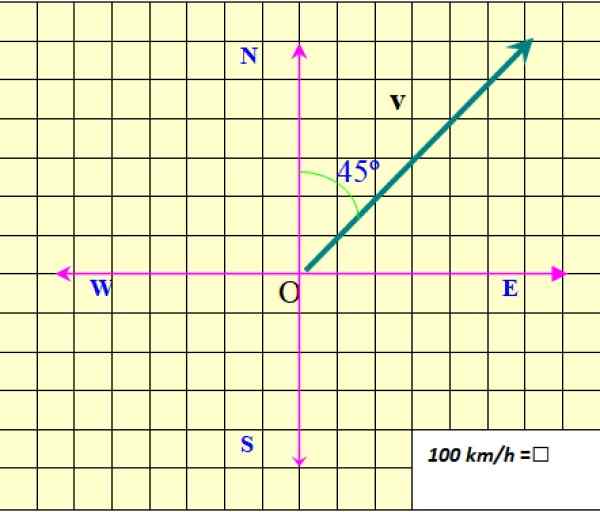 Figura 2. Um vetor de velocidade. Fonte: f. Zapata.
Figura 2. Um vetor de velocidade. Fonte: f. Zapata. A figura mostra o vetor de velocidade do avião, que é indicado como v em audacioso, para distingui -lo de uma quantidade escalar, que requer apenas um valor numérico e alguma unidade a ser especificada.
[TOC]
Elementos de um vetor
Como dissemos, os elementos vetoriais são:
-Magnitude ou módulo, às vezes também chamado de valor absoluto ou padrão vetorial.
-Endereço
-Senso
No exemplo da Figura 2, o módulo de v São 850 km/h. O módulo é indicado como V sem negrito, ou como |v|, Onde as barras representam o valor absoluto.
O endereço de v é especificado em relação ao norte. Nesse caso, é 45º ao norte do leste (45º NE). Finalmente a ponta da seta informa sobre a direção de v.
Neste exemplo, a origem vetorial foi desenhada coincidindo com o sistema de origem ou coordenadas, isso é conhecido como Vetor vinculado. Por outro lado, se a origem do vetor não corresponde a do sistema de referência, diz -se que é um vetor livre.
Deve -se notar que, para especificar completamente o vetor, esses três elementos devem ser indicados, caso contrário, a descrição do vetor seria incompleta.
Componentes retangulares de um vetor
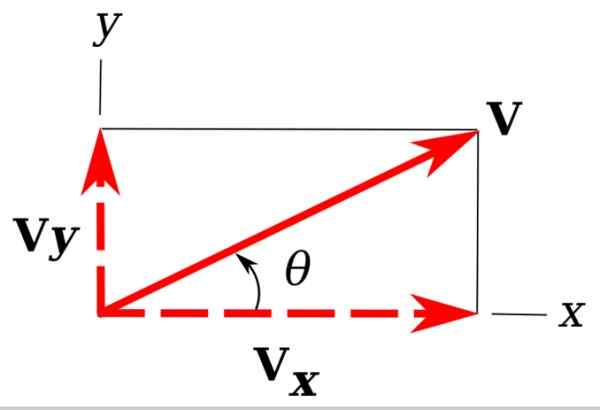 Figura 3. Componentes retangulares de um vetor no plano. Fonte: Wikimedia Commons. Para mais [CC BY-SA 3.0 (https: // CreativeCommons.Org/licenças/BY-SA/3.0)]
Figura 3. Componentes retangulares de um vetor no plano. Fonte: Wikimedia Commons. Para mais [CC BY-SA 3.0 (https: // CreativeCommons.Org/licenças/BY-SA/3.0)] Na imagem, temos de volta nosso exemplo de vetor v, isso está no avião XY.
É fácil perceber que as projeções v nos eixos de coordenadas x e y determinam um triângulo certo. Essas projeções são ve e vx e são chamados de componentes retangulares de v.
Uma maneira de denotar v Através de seus componentes retangulares, é assim: v =
Se o vetor estiver no espaço tridimensional, mais um componente será necessário, para que:
v =
Conhecendo os componentes retangulares, a magnitude do vetor é calculada, equivalente a encontrar a hipotenusa do triângulo certo cujas pernas são vx e ve,. Através do teorema de Pitágoras, segue -se que:
|v|2 = (vx)2 + (ve)2
Forma polar de um vetor
Quando a magnitude do vetor é conhecida |v| E o ângulo θ que este formulário com o eixo de referência, geralmente o eixo horizontal, o vetor é igualmente especificado. Dizem então que o vetor é expresso em forma polar.
Os componentes retangulares neste caso são facilmente calculados:
vx = |v|.cos θ
ve = |v|.sin θ
De acordo com o exposto, os componentes retangulares do vetor de velocidade v do avião seria:
vx = 850 . cos 45º km/h = 601.04 km/h
ve = 850 . Sen 45º km/h = 601.04 km/h
Pessoal
Existem vários tipos de vetores. Existem vetores de veia, posição, deslocamento, força, campo elétrico, quantidade de movimento e muito mais. Como já dissemos, na física, existem muitas magnitudes vetoriais.
Quanto aos vetores que têm certas características, podemos mencionar os seguintes tipos de vetores:
-Nulo: Esses são vetores cuja magnitude é 0 e que são denotados como 0. Lembre -se de que a letra ousada simboliza as três características fundamentais de um vetor, enquanto a letra normal representa apenas para o módulo.
Por exemplo, sobre um corpo em equilíbrio estático, a soma das forças deve ser um vetor nulo.
-Grátis e vinculado: Vetores livres são aqueles cujos pontos de origem e chegada são qualquer par de pontos do avião ou espaço, diferentemente dos vetores vinculados, cuja origem coincide com o do sistema de referência usado para descrevê -los.
O par ou momento produzido por algumas forças é um bom exemplo de vetor livre, pois o torque não se aplica a algum ponto específico.
-Equipamento: São dois vetores livres que compartilham características idênticas. Portanto, eles têm a mesma magnitude, direção e significado.
-Coplanares ou coplanarios: vetores que pertencem ao mesmo avião.
-Opostos: vetores com igual magnitude e direção, mas sentidos opostos. O vetor oposto a um vetor v É o vetor -v E a soma de ambos é o vetor nulo: v + (-v) = 0.
-Simultâneo: vetores cujas linhas de ação passam pelo mesmo ponto.
-Deslizar: são aqueles vetores cujo ponto de aplicação pode deslizar ao longo de uma linha específica.
-Colineal: vetores que estão localizados na mesma linha.
-Unitário: Aqueles vetores cujo módulo é 1.
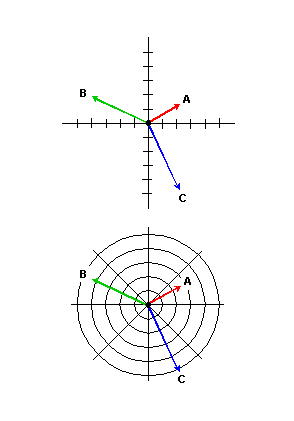
Vetores da unidade ortogonal
Existe um tipo de vetor muito útil na física chamada Orthogonal Unit Vector. O vetor da unidade ortogonal possui um módulo igual a 1 e as unidades podem ser qualquer, por exemplo, aquelas de velocidade, posição, força ou outra.
Há um conjunto de vetores especiais que ajudam a representar facilmente outros vetores e executar operações com eles: eles são os vetores da unidade ortogonal Yo, J e k, Unitário e perpendicular um ao outro.
Em duas dimensões, esses vetores são direcionados ao longo do sentido positivo de ambos os eixos x A partir do eixo e. E em três dimensões, um vetor de unidade é adicionado na direção do eixo z positivo. Eles estão representados da seguinte maneira:
Pode atendê -lo: qual é a estrutura da pesquisa documental?Yo =
J =
k =
Um vetor pode ser representado por vetores de unidade Yo, J e k Como segue:
v = vx Yo + ve J + vz k
Por exemplo, o vetor de velocidade v A partir dos exemplos anteriores, você pode escrever como:
v = 601.04 Yo + 601.04 J km/h
O componente em k Não é necessário, pois este vetor está no plano.
Soma de vetores
A soma dos vetores aparece com muita frequência em várias situações, por exemplo, quando você deseja encontrar a força resultante em um objeto que é afetado por várias forças. Para começar, suponha que você tenha dois vetores livres ou e v No avião, como o seguinte mostra a esquerda:
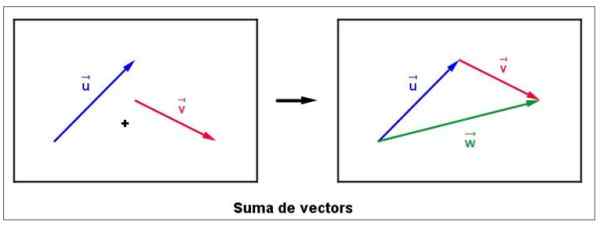 Figura 4. Soma gráfica de dois vetores. Fonte: Wikimedia Commons. LLUC CABANACH [CC BY-SA 3.0 (https: // CreativeCommons.Org/licenças/BY-SA/3.0)].
Figura 4. Soma gráfica de dois vetores. Fonte: Wikimedia Commons. LLUC CABANACH [CC BY-SA 3.0 (https: // CreativeCommons.Org/licenças/BY-SA/3.0)]. Ele se muda imediatamente para o vetor v, sem modificar sua magnitude, direção ou significado, de modo que se origina coincide com o fim de ou.
O vetor da soma é chamado C e é desenhado a partir de u terminando em v, De acordo com a figura certa. É importante observar que a magnitude do vetor C Não é necessariamente a soma das magnitudes de v e ou.
Se é cuidadosamente refletido nesse sentido, a única ocasião em que a magnitude do vetor resultante é a soma das magnitudes dos adição. É quando ambos os viciados estão na mesma direção e têm o mesmo significado.
E o que acontece se os vetores não forem livres? Também é muito fácil adicioná -los. A maneira de fazer é adicionar componente componente ou método analítico.
Como exemplo, vamos considerar os vetores da figura a seguir, a primeira coisa é expressá -los de uma das formas cartesianas explicadas anteriormente:
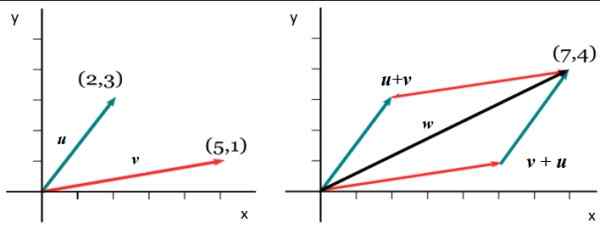 Figura 5. Soma de dois vetores vinculados. Fonte: Wikimedia Commons.
Figura 5. Soma de dois vetores vinculados. Fonte: Wikimedia Commons. v =
ou =
Para obter o componente em x do vetor acrescenta C, Os respectivos componentes são adicionados em x de v e ou: Cx = 5+2 = 7. E para obter Ce Um procedimento análogo é seguido: We = 1+3. Portanto:
ou =
Propriedades da soma dos vetores
-A soma de dois ou mais vetores resulta em outro vetor.
-É comutativo, a ordem das adições não altera a soma, de modo que:
ou + v = v + ou
-O elemento neutro da soma dos vetores é o vetor nulo: v + 0 = v
-A subtração de dois vetores é definida como a soma do oposto: v - u = v + (-ou)
Exemplos de vetores
Como dissemos, existem inúmeras quantidades vetoriais na física. Entre os mais conhecidos estão:
-Posição
-Deslocamento
-Velocidade média e velocidade instantânea
-Aceleração
-Força
-Quantidade de movimento
-Torque ou momento de força
-Impulso
-Campo elétrico
-Campo magnético
-Momento magnético
Por outro lado, eles não são vetores, mas escalando:
-Tempo
-Massa
-Temperatura
-Volume
-Densidade
-Trabalho mecanico
-Energia
-Aquecer
-Poder
-Tensão
-Corrente elétrica
Outras operações entre vetores
Além da soma e subtração de vetores, existem três outras operações entre vetores muito importantes, porque eles dão origem a novas magnitudes físicas muito importantes:
-Produto de um escalar para um vetor.
-O produto escalar ou produto pontual entre vetores
-E o produto cruzado ou vetorial entre dois vetores.
Produto de um escalar para um vetor
Considere a segunda lei de Newton, que afirma que a força F e aceleração para Eles são proporcionais. A constante de proporcionalidade é a massa m do objeto, portanto:
F = m.para
A massa é um escalar; Por sua parte, força e aceleração são vetores. Como a força é obtida multiplicando a massa pela aceleração, é o resultado do produto de um escalar por um vetor.
Pode atendê -lo: exemplos de estrutura teóricaEste tipo de produto sempre resulta em um vetor. Aqui outro exemplo: a quantidade de movimento. Ser P A quantidade de movimento vetorial, v O vetor de velocidade e como sempre, m é a massa:
P = m.v
Produto escalar ou produto pontual entre vetores
Colocamos um trabalho mecânico na lista de magnitudes que não são vetores. No entanto, o trabalho em física é o resultado de uma operação entre vetores chamado produto escalar, produto interno ou produto de ponto.
Sejam os vetores v e ou, O produto de ponto ou escalada é definido entre eles:
v∙ou = |v| ∙ |ou |.cos θ
Sendo θ o ângulo entre eles. A partir da equação mostrada, é imediatamente deduzido que o resultado do produto Point é um escalar e também que se ambos os vetores forem perpendiculares, seu produto escalar será 0.
Voltar ao trabalho mecânico C, Este é o produto escalar entre o vetor de força F e o deslocamento vetorial ℓ.
W = F∙ℓ
Quando os vetores estão disponíveis em termos de seus componentes, o produto Point também é muito simples de calcular. Sim v =
v∙ou = vx oux + ve oue + vz ouz
O produto de ponto entre os vetores é comutativo, portanto:
v∙ou = ou∙v
Produto transversal ou produto vetorial entre vetores
Sim v E você é nossos dois vetores de exemplo, o produto vetorial é definido como:
v x ou = C
Segue imediatamente que o produto cruzado resulta em um vetor, cujo módulo é definido como:
|v x u | = | V | . | u |. sin θ
Onde θ É o ângulo entre os vetores.
O produto cruzado não é comutativo, portanto v x u ≠ u x v. De fato v x U = - (u x V).
Se os dois exemplo forem expressos em termos de vetores da unidade, o cálculo do produto vetorial será facilitado:
v = vx Yo + ve J + vz k
ou = ux Yo + oue J + ouz k
Cruz produtos entre vetores de unidade
O produto cruzado entre vetores de unidade idêntica é nulo, pois o ângulo entre eles é 0º. Mas entre diferentes vetores unitários, o ângulo entre eles é 90º e sin 90º = 1.
O esquema a seguir ajuda a encontrar esses produtos. Na direção da seta, faz sentido positivo e na direção oposta:
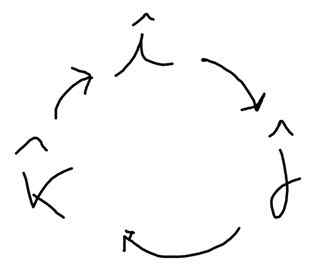
Yo x J = K, J x k = Yo; k x Yo = J; J x i = -k; k x J = -Yo; Yo x k = -J
Aplicando a propriedade distributiva, que permanece válida para produtos entre vetores mais as propriedades dos vetores da unidade, você tem:
v x ou = (vx Yo + ve J + vz k) X (ux Yo + oue J + ouz k) =
= (veouz - vzoue )Yo + (vzoux - vxouz )J + (vxoue - veoux )k
Exercícios resolvidos
- Exercício 1
Dados os vetores:
v = -5 Yo + 4J + 1 k
ou = 2 Yo -3 J + 7k
O que deve ser o vetor C para que a soma v + ou + C resultados 6 Yo +8 J -10k?
Solução
-5 Yo + 4J + 1 k
2 Yo -3 J + 7k
Cx Yo + Ce J + Cz k +
--
6Yo + 8 J -10 k
Portanto, deve -se cumprir que:
-5 +2 + Wx = 6 → Wx = 9
4-3 + we = 8 → We = 7
1 + 7 + Wz = -10 → Wz = -18
A resposta é: C = 9 Yo +7 J - 18k
- Exercício 2
Qual é o ângulo entre os vetores v e ou do Exercício 1?
Solução
Vamos usar o produto escalar. Nós temos:
cos θ = v∙ou / |v| ∙ |ou|
v∙ou= -10 -12+7 = -15
|v| = √ (-5)2 +42 +12= √42 = 6.48
|ou| = √22 +(-3)2 +72= √62 = 7.87
Substituindo esses valores:
cos θ = -15 / 6.48 x 7.87 = -0.2941 → θ = 107.1º
Referências
- Figueroa, d. (2005). Série: Física para Ciência e Engenharia. Volume 1. Cinemática. Editado por Douglas Figueroa (USB).
- Giancoli, d. 2006. Física: Princípios com aplicações. 6º. Ed Prentice Hall.
- Rex, a. 2011. Fundamentos da Física. Pearson.
- Sears, Zemansky. 2016. Física da Universidade com Física Moderna. 14º. Ed. Volume 1.
- Serway, r., Jewett, J. 2008. Física para Ciência e Engenharia. Volume 1. 7º. Ed. Cengage Learning.