

Teorema de Varignon
- 713
- 65
- Orlando MacGyver
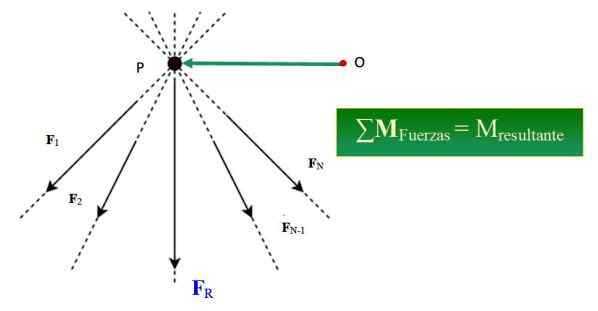
figura 1.- O teorema de Varignon afirma que a soma do momento das forças em torno de um certo ponto é equivalente ao tempo do resultado em relação a esse ponto. Fonte: Wikimedia Commons/F. Zapata. Qual é o teorema de Varignon?
O teorema de Varignon, na mecânica, afirma que a soma dos momentos produzidos por um sistema de forças simultâneas em relação a um certo ponto é igual ao momento da força resultante em relação ao mesmo ponto.
Por esse motivo, este teorema também é conhecido como O começo dos momentos.
Enquanto o primeiro a afirmar que foi o holandês Simon Stevin (1548-1620), o criador do paradoxo hidrostático, o matemático francês Pierre Varignon (1654-1722) foi quem posteriormente lhe deu sua forma definitiva.
Um exemplo de como o teorema de Varignon funciona em mecânica é o seguinte: suponha que um sistema simples de dois coplanares e forças simultâneas atue em um ponto F1 e F2, (Indicado com negrito por seu personagem vetorial). Essas forças dão origem a uma força líquida ou resultante, chamada FR.
Cada força exerce um torque ou momento em relação a um ponto ou, que é calculado pelo produto vetorial entre o vetor de posição rOp e a força F, onde rOp É direcionado de ou para o ponto de concordância P:
MO1 = rOp × F1
MO2 = rOp × F2
Dado que FR = F1 + F2, então:
MQUALQUER = rOp × F1 + rOp × F2 = MO1 + MO2
Mas como rOp É um fator comum, então, aplicando propriedades distributivas ao produto cruzado:
MQUALQUER = rOp × (F1 + F2) = rOp × FR
Portanto, a soma dos momentos ou torques de cada força em relação ao ponto ou é equivalente ao tempo da força resultante em relação ao mesmo ponto.
Declaração e demonstração
Ser um sistema de n forças simultâneas, formadas por F1, F2, F3.. FN, cujas linhas de ação são destinadas ao ponto P (veja a Figura 1), o momento deste sistema de forças MQUALQUER, Sobre um ponto ou é dado por:
Pode servir a você: Equilíbrio instável: conceito e exemplosMQUALQUER = rOp × F1 + rOp × F2 + rOp × F3 +.. rOp × FN = rOp × (F1 + F2 + F3 +.. FN)
Demonstração
Para demonstrar o teorema, a propriedade distributiva do produto vetorial entre vetores é feita.
Sejam as forças F1, F2, F3.. FN aplicado a pontos para1, PARA2, PARA3… PARAN e simultaneamente no ponto P. O momento resultante deste sistema, com relação a um ponto ou, chamado MQUALQUER, É a soma dos momentos de cada força, com relação a esse ponto:
MQUALQUER = ∑ rOAI × FYo
Onde a soma vai de i = 1 a i = n, já que existem n forças. Como essas são forças simultâneas e, como o produto vetorial entre vetores paralelos é nulo, acontece que:
rPAI × FYo = 0
Com o vetor nulo denotado como 0.
O momento de uma das forças em relação a, por exemplo, a da força FYo aplicado em aYo, se escreve assim:
Mouvi = rOAI × FYo
O vetor de posição rOAI Pode ser expresso como a soma da posição de dois vetores:
rOAI = rOp + rPAI
Dessa maneira, o momento em relação ou força FYo é:
Mouvi = (rOp + rPAI) × FYo = (rOp × FYo) + (rPAI × FYo)
Mas o último termo é nulo, como explicado acima, porque rPAI está na linha de ação de FYo, portanto:
Mouvi = rOp × FYo
Sabendo que o momento do sistema em relação ao ponto ou é a soma de todos os momentos individuais de cada força em relação a esse ponto, então:
MQUALQUER = ∑ Mouvi = ∑ rOp × FYo
Como rOp É constante sai da soma:
MQUALQUER = rOp × (∑ FYo)
Mas ∑ FYo É simplesmente a rede ou força resultante FR, Portanto, conclui -se imediatamente que:
Pode servir a você: Leyden Bottle: Peças, Operação, ExperiênciasMQUALQUER = rOp × FR
Exemplo
O teorema de Varignon facilita o cálculo do momento da força F Em relação ao ponto ou estrutura mostrada na figura, se a força for dividida em seus componentes retangulares e o momento de cada um deles é calculado:
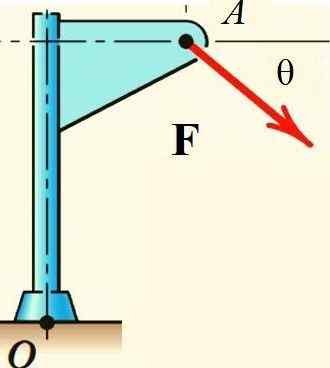 Figura 2.- O teorema de Varignon se aplica para calcular o momento da força ao redor ou. Fonte: f. Zapata.
Figura 2.- O teorema de Varignon se aplica para calcular o momento da força ao redor ou. Fonte: f. Zapata. Aplicações do Teorema da Varignon
Quando a força resultante de um sistema é conhecida, o teorema de Varignon pode ser aplicado para substituir a soma de cada um dos momentos produzidos pelas forças que o compõem no momento do resultante.
Se o sistema consiste em forças no mesmo plano e o ponto em relação ao qual você deseja calcular o momento pertence a esse plano, o momento resultante é perpendicularmente.
Por exemplo, se todas as forças estiverem no plano XY, o momento é direcionado no eixo z e resta apenas sua magnitude e seu significado, esse é o caso do exemplo descrito acima.
Nesse caso, o teorema de Varignon permite calcular o momento resultante do sistema através do somatório. É muito útil no caso de um sistema de forças tridimensionais, para as quais a direção do momento resultante não é conhecida a priori.
Para resolver esses exercícios, é conveniente.
Exercício resolvido
Por teorema de Varignon, calcule o momento da força f ao redor do ponto ou mostrado na figura se a magnitude de f for 725 n.
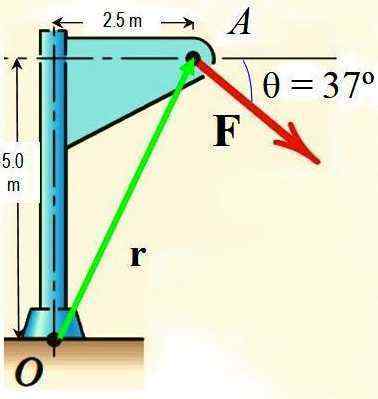 Figura 3.- Figura para o exercício resolvido. Fonte: f. Zapata.
Figura 3.- Figura para o exercício resolvido. Fonte: f. Zapata. Solução
Para aplicar o teorema de Varignon, a força se decompõe F em dois componentes, cujos respectivos momentos ao redor ou são calculados e adicionados para obter o momento resultante.
Pode servir você: corpo rígidoFx = 725 n ∙ cos 37 º = 579.0 n
Fe = - 725 n n ∙ sen 37 º = −436.3 n
Da mesma forma, o vetor de posição r Dirigido de ou para a tem os componentes:
rx = 2.5m
re = 5.0 m
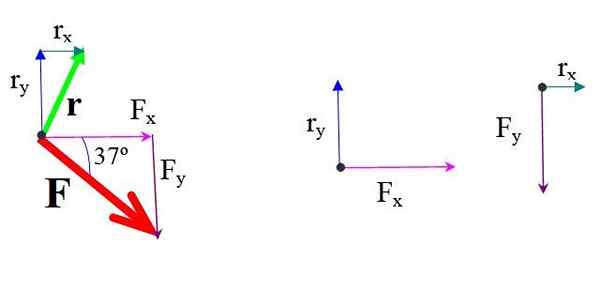 Figura 4.- Componentes de força e posição. Fonte: f. Zapata.
Figura 4.- Componentes de força e posição. Fonte: f. Zapata. O momento de cada componente da força em relação ou está multiplicando a força e a distância perpendicular.
Ambas as forças tendem a girar a estrutura na mesma direção, que neste caso é o sentido da pontuação, que é arbitrariamente atribuído sinal positivo:
MBoi = Fx∙ re ∙ Sin 90º = 579.0 n ∙ 5.0 m = 2895 n ∙ m
MOy = Fe∙ rx ∙ Sin (−90º) = −436.3 n ∙ 2.5 m ∙ (−1) = 1090.8 n ∙ m
O momento resultante em relação a ou é:
MQUALQUER = MBoi + MOy = 3985.8 n ∙ m perpendicular ao plano e em um torque.
Referências
- Bedford, 2000. PARA. Mecânica para engenharia: estático. Addison Wesley.
- Cerveja, f. 2010. Estático. McGraw Hill. 9NA. Edição.
- Hibbeler, R. 1992. Mecânica para engenheiros. 6º. Edição. CECSA.
- Engenharia HK. Teorema de Varignon. Recuperado de: youtube.com.
- Wikipedia. Teorema de Varignon (mecânica). Recuperado de: em.Wikipedia.org.