

Magnitude do vetor
- 1407
- 185
- Tim Mann
O que é uma magnitude vetorial?
A Magnitude do vetor É qualquer expressão representada por um vetor que tenha valor numérico (módulo), direção, direção e ponto de aplicação. Alguns exemplos de magnitudes vetoriais são deslocamento, velocidade, força e campo elétrico.
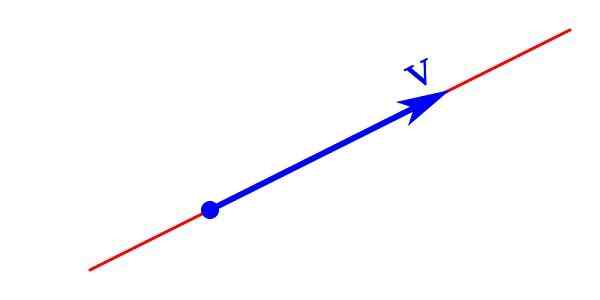
A representação gráfica de uma magnitude vetorial consiste em uma seta cuja ponta indica sua direção e direção, seu comprimento é o módulo e o ponto de partida é a origem ou ponto de aplicação.
Representação gráfica de um vetor A magnitude do vetor é representada analiticamente com uma carta que carrega uma flecha no topo apontando para a direita na direção horizontal. Também pode ser representado por uma carta escrita em negrito V cujo módulo ǀVǀ está escrito em itálico V.
Uma das aplicações do conceito de magnitude do vetor está no design de rodovias e estradas, especificamente no design de suas curvaturas. Outra aplicação é o cálculo do deslocamento entre dois lugares ou a mudança de velocidade de um veículo.
Elementos de uma magnitude vetorial
Uma magnitude vetorial é qualquer entidade representada por um segmento de linha, com orientação no espaço, que tem as características de um vetor. Seus elementos são:
Módulo: É o valor numérico que indica o tamanho ou intensidade da magnitude do vetor.
Endereço: É a orientação do segmento de linha no espaço que o contém. O vetor pode ter direção horizontal, vertical ou inclinada; Norte, sul, este ou oeste; Nordeste, sudeste, sudoeste ou noroeste.
Senso: É indicado com a ponta da flecha no final do vetor.
Pode servir a você: Física antes dos gregos (Antígua Grécia)Ponto de aplicação: É a origem ou ponto de ação inicial do vetor.
Classificação vetorial
Os vetores são classificados como colineares, paralelos, perpendiculares, simultâneos, dísticos, livres, deslizantes, opostos, equipamentos, fixos e unitários.
Colineal: Eles pertencem ou agem na mesma linha reta, também são chamados linearmente dependente E eles podem ser verticais, horizontais e inclinados.
Paralelos: Eles têm o mesmo endereço ou inclinação.
Perpendicular: Dois vetores são perpendiculares um ao outro quando o ângulo entre eles é 90 °.
Simultâneo: São vetores que, ao deslizar sobre sua linha de ação, coincidem no mesmo ponto do espaço.
Coplanarios: Eles agem em um avião, por exemplo, o avião XY.
Livre: Eles se movem para qualquer lugar do espaço, mantendo seu módulo, direção e significado.
Deslizar: Eles se movem ao longo da linha de ação determinada por sua direção.
Opostos: Eles têm o mesmo módulo e direção, e a direção oposta.
Equipamento: Eles têm o mesmo módulo, direção e significado.
Fixo: O ponto de aplicação foi invariável.
Unitário: Vetores cujo módulo é a unidade.
Componentes vetoriais
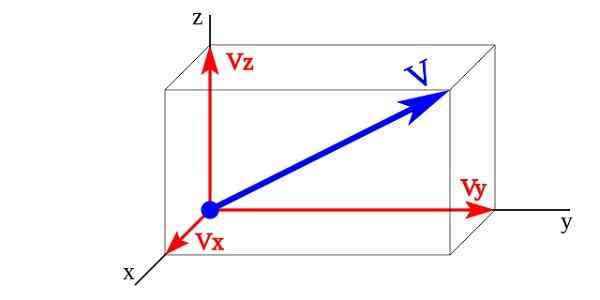
Uma magnitude vetorial em um espaço tridimensional é representada em um sistema de três eixos perpendiculares um ao outro (X e z) chamado ortogonal tentou.
 Componentes vetoriais de uma magnitude vetorial
Componentes vetoriais de uma magnitude vetorial Na imagem, os vetores Vx, Vy, Vz são os componentes vetoriais vetores V cujos vetores de unidade são x,e,z. A magnitude do vetor V É representado pela soma de seus componentes vetoriais.
V = Vx + Vy + Vz
O resultado de várias magnitudes do vetor é a soma vetorial de todos os vetores e substitui esses vetores em um sistema.
Campo vetorial
O campo vetorial é a região do espaço em que em cada um de seus pontos uma magnitude vetorial corresponde. Se a magnitude manifestada é uma força que atua em um corpo ou sistema físico, o campo vetorial é um campo de forças.
Pode servir a você: Teorema de Steiner: Explicação, Aplicações, ExercíciosO campo vetorial é representado graficamente por linhas de campo que são linhas tangentes da magnitude do vetor em todos os pontos da região. Alguns exemplos de campos vetoriais são o campo elétrico criado por uma carga elétrica pontual no espaço e no campo de velocidade de um fluido.
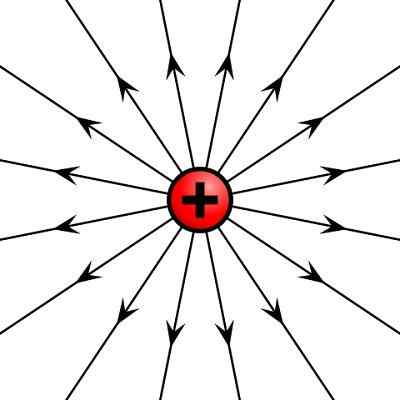 Campo elétrico criado por uma carga elétrica positiva
Campo elétrico criado por uma carga elétrica positiva Operações com vetores
Adição de vetores: É o resultado de dois ou mais vetores. Se você tem dois vetores QUALQUER e P A soma é QUALQUER + P = q. O vetor Q É o vetor resultante que é obtido movendo graficamente a origem do vetor PARA até o final do vetor B.
Subtração vetorial: A subtração de dois vetores ou e P é QUALQUER - P = Q. O vetor Q Você obtém adição ao vetor QUALQUER Seu oposto -P. O método gráfico é o mesmo que a soma com a diferença de que o vetor oposto é transferido para o extremo.
Produto escalar: O produto de uma magnitude escalar para por uma magnitude vetorial P É um vetor MP que tem a mesma direção do vetor P. Se a magnitude escalar for zero, o produto escalar é um vetor nulo.
Exemplos de magnitudes vetoriais
Posição
A posição de um objeto ou partícula em relação a um sistema de referência é um vetor que é dado por suas coordenadas retangulares X e z, e é representado por seus componentes vetoriais XI, Yĵ, Zk. Os vetores Yo, ĵ, k Eles são vetores de unidade.
Uma partícula em um ponto (X e z) tem um vetor de posição r = XI + Yĵ + Zk. O valor numérico da posição vetorial é r= √ (x2 + e2 + z2). A mudança na posição de partícula de uma posição para outra em relação a um sistema de referência é o vetor Deslocamento Δr E é calculado com a seguinte expressão vetorial:
Pode atendê -lo: raios anódicosΔr = r2 - r1
Aceleração
Aceleração média (param) É definido como a variação da velocidade v Em um intervalo de tempo Δt E a expressão para calculá -lo é param= ΔV/ΔT, ser ΔV A velocidade de mudança de vetor.
Aceleração instantânea (para) é o limite de aceleração média param quando Δt torna -se tão pequeno que tende a zero. A aceleração instantânea é expressa de acordo com seus componentes vetoriais
para =paraxYo +parae ĵ+ parazk
Campo gravitacional
A força de atração gravitacional exercida por uma massa M, Localizado na origem, em outra massa m Em um ponto do espaço x, e, z É um campo vetorial chamado campo de força gravitacional. Esta força é dada pela expressão:
F= (-mmg/r)ȓ
r = XI + Yĵ + Zk
F = É a força gravitacional de magnitude física
G = é a constante de gravitação universal
ȓ = é o vetor de posição de massa m
Referências
- Tallack, J C. Introdução à análise vetorial. Cambridge: Cambridge University Press, 2009.
- Spiegel, MR, Lipschutz, S e Spellman, D. Vetor de análise. s.eu. : Mc Graw Hill, 2009.
- Marca, l. Vetor de análise. Nova York: Dover Publications, 2006.
- Griffiths, D J. Introdução à electodinâmica. Nova Jersey: Prentice Hall, 1999. p. 1-10.
- Haia, b. Uma introdução à análise vetorial. Glasgow: Methuen & Co. Ltd, 2012.