

História dos robôs

- 2067
- 275
- Terrell Stokes
O História dos robôs Tudo começou muito antes do que geralmente se pensa; Da Grécia antiga, os filósofos mais reconhecidos começaram a fazer xixi a possibilidade de criar artefatos ou aparelhos que substituíram o trabalho humano, especificamente naquelas atividades relacionadas à limpeza das fazendas e ao cultivo de alimentos.
O professor Leonardo da Vinci também fez teorias e tratado sobre a possibilidade da existência dessas máquinas. O primeiro nome concedido ao que agora é conhecido como robôs era "humanóide", porque eles foram inspirados pela forma humana.
Outro termo necessário para entender o início dos robôs e a disciplina robótica é "autômato", que em grego significa "com movimento próprio" ou "espontâneo". Esta palavra define uma máquina cujo objetivo é imitar não apenas movimentos, mas também a figura de um ser animado; Isso pode ter semelhanças com a forma humana ou com outro ser vivo.
Considera -se que Da Vinci projetou dois autômatos durante sua carreira artística e inventora: o primeiro consistia em um tipo de soldado constituído por uma armadura; Eu tinha o poder de me mover e sentar por conta própria. O outro autômato, design mais complexo, era um tipo de leão que seria usado pelo rei para estabelecer seus tratados de paz.
Quanto ao termo "robô", ele foi cunhado pela palavra tchecoslovaca Robota, o que significa "trabalho forçado". A primeira vez que essa definição apareceu foi em um romance intitulado R.OU.R., Escrito pelo escritor da nacionalidade tcheco Karl Capek.
Este trabalho foi publicado em 1920 e seu enredo é desenvolvido em torno da existência de máquinas muito semelhantes ao homem e que têm a capacidade de realizar um trabalho difícil e até perigoso; No final do texto, os robôs acabam conquistando espaços humanos, também dominando o homem.
Embora a ficção tenha sido responsável por criar preconceitos sobre máquinas -se dentro da literatura ou na indústria cinematográfica -muitos cientistas e estudiosos apostam em robótica, já que um de seus principais objetivos é facilitar o trabalho humano, especialmente aqueles que são mais alienantes e tediosos.
Dos gregos a Descartes
Não apenas os gregos e o Renascença estavam interessados em criar esse tipo de máquinas. Personalidades como Newton e Descartes também tiveram a idéia de que, através de uma máquina, a libertação do homem rotineiro e suas atividades monótonas seriam possíveis.
Pode atendê -lo: Chegada ao Escritório de Destino Internacional: Significado, TempoEsses cientistas consideraram que a máquina ideal seria responsável por resolver problemas matemáticos, pois argumentaram que o homem, por ser uma criatura criativa e universal, não deveria ter a tarefa de escravizar na solução repetitiva e metódica dos problemas matemáticos.
Como conseqüência, o homem acabaria sendo capaz de usar seu potencial intelectual, separando -se da necessidade de encontrar tais soluções.
É provável que o ideal desses estudiosos tenha sido o que se materializou com os computadores atuais, pois eles têm a capacidade de resolver problemas matemáticos dessa natureza.
A família do relojoeiro
Alguns historiadores e cronistas consideram que esse tipo de dispositivos surgiu no século XVI -embora outros digam que as origens dessas máquinas são muito mais antigas -especificamente durante o tribunal de Luís XV da França.
Dizem que, naquele momento, um famoso relojoeiro havia perdido toda a sua família, então ele tomou a decisão de substituí -lo da criação de bonecas mecânicas que funcionaram graças a um sistema de equipamentos (como um relógio), mas muito mais complicado e elaborado.
Essas máquinas causaram um grande impacto na França do momento, então o rei Luís XV decidiu encomendar o relojoeiro alguns desses dispositivos; No entanto, o objetivo dessas bonecas consistia no mero entretenimento, então esses primeiros robôs eram apenas ornamentais.
Depois disso, a seguinte referência histórica sobre mecanismos desse tipo ocorreu no curso da Revolução Industrial, quando diferentes máquinas começaram a aparecer que mudaram completamente o curso da economia e dos sistemas de trabalho.
O primeiro robô industrial
Graças ao uso de engrenagens e máquinas a vapor, foi possível realizar a automação de atividades produtivas. O nascimento dos robôs pode ser estabelecido na época, sob uma concepção industrial.
De fato, uma das primeiras definições desse tipo de artefato consistia em uma máquina que tem a capacidade de executar diferentes atividades reiterativamente, sem a necessidade de ser supervisionado pelo olho humano.
Pode atendê -lo: valores físicos: características e exemplosInquietação do trabalho
Quando surgiram máquinas industriais, houve uma forte modificação no campo social, que trouxe aspectos positivos e aspectos negativos; Quando o homem foi substituído pela máquina, centenas de pessoas perderam o emprego, especialmente na área da indústria têxtil.
Por esse motivo, uma preocupação com o deslocamento do homem através da máquina ainda permanece latente. No entanto, essas máquinas exigiam manutenção especial, uma vez que seus sistemas eram muito primitivos. Quando eles começaram a quebrar, as indústrias tiveram que contratar pessoal novamente.
Isso mostra que, apesar dos avanços tecnológicos, a presença humana sempre será elementar para o desenvolvimento correto das empresas, uma vez que as máquinas precisam de uma varredura constante e várias revisões.
Portanto, é possível que novos empregos para humanos sejam criados na medida em que aparecem novos robôs.
Surgimento da computação
Com o desenvolvimento da computação, novos sistemas que melhoram a qualidade da disciplina robótica foram implementados. Durante os anos 60, foi aberto um espaço para a criação e inovação, o que também permitiu a extensão dos empregos para robôs dentro da vida cotidiana.
A aparência de braços mecânicos
Graças ao desenvolvimento da tecnologia, uma série de máquinas com maior grau de mobilidade através de mecanismos mais complexos foram fabricados. Portanto, a faixa de potência foi estendida e o consumo de energia foi reduzido.
A partir deste momento, os robôs poderiam ser controlados através do uso de computadores, o que resultou no aparecimento de braços mecânicos, que agem graças a impulsos elétricos que foram codificados anteriormente.
Devido à aparência dessa máquina muito mais complexa, surgiu uma nova definição para robôs.
Atualmente, um robô pode ser definido como uma união de sistemas com elementos eletrônicos e mecânicos que podem interagir entre si, o que permite uma tarefa específica; Esta atividade é atribuída e controlada a partir de um computador.
Influência de George Retol
Levando em conta essas características, pode -se estabelecer que o primeiro robô industrial surgiu com George Retol, um inventor da nacionalidade americana a quem a criação deste primeiro robô é atribuída.
Pode servir a você: 110 Livros recomendados para ler em sua vida (2021)O objetivo da Retol era fabricar uma máquina que pudesse ser flexível e se adaptar ao meio ambiente; Além disso, era essencial que fosse fácil de lidar. Em 1948, este inventor patenteou um manipulador programável, que mais tarde foi considerado o primeiro robô industrial.
Retol, juntamente com seu parceiro Joseph Engelberger, decidiu fundar a primeira empresa que fabricará robôs. Isso foi chamado Corporação de controles consolidados, E começou a trabalhar em 1956. Posteriormente, o nome da empresa foi modificado para Unimation.
Foi então que surgiu o primeiro braço robótico, que eles chamaram Unimate. Esta máquina pesava 1800 kg e sua função era levantar e conglomerar uma pilha de enormes peças de metal quente.
Robôs hoje
Atualmente, existe um único tipo de robô, mas você pode encontrar uma ampla gama de máquinas cujos propósitos não são apenas industriais, mas também têm o objetivo de melhorar a qualidade da vida humana nos aspectos mais cotidianos.
Em 1969, o termo de robô ou robótica foi expandido para a mecatrônica, que se refere a uma integração de engenharia mecânica com engenharia eletrônica e artificial.
A invenção mais relevante na robótica é a inclusão de inteligência artificial, cujo objetivo é dar às máquinas a capacidade de responder a diferentes estímulos.
Na próxima seção, você pode ver alguns dos robôs mais avançados de hoje.
Automatos com capacidade de raciocínio
Em nossos dias, podemos ver robôs que têm a capacidade de reagir às particularidades do meio ambiente, assim como os sensores que lhes permitem se relacionar com seu ambiente e seres vivos. Isso permite que as atividades realizadas pelos robôs tenham um desempenho com mais eficiência.
Da mesma forma, um dos objetivos que a disciplina robótica tem para esta década é que essas máquinas estão aumentando.
Além disso, os cientistas desejam implementar a capacidade de raciocínio e questionamento nesses robôs.
Imagens
Robô de Pepper, focado no atendimento ao cliente. Foto tirada em 2014. Tokumeigakarinoaoshima [CC0], da Wikimedia Commons 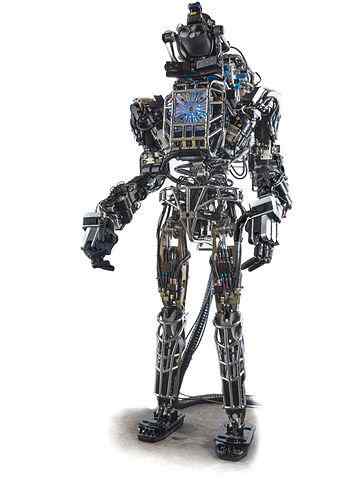 Robô do Atlas Humanóide, criado por Darpa e Boston Dynamics
Robô do Atlas Humanóide, criado por Darpa e Boston Dynamics  Toyota Robot. Chris 73, Commons.Wikimedia.org
Toyota Robot. Chris 73, Commons.Wikimedia.org  Expo 2005, Nagakute (Aichi). Foto de Gnsin, Balance Branco de Edokter, Crop por OD1N [CC BY-SA 3.0 (http: // criativecommons.Org/licenças/BY-SA/3.0/)], via Wikimedia Commons
Expo 2005, Nagakute (Aichi). Foto de Gnsin, Balance Branco de Edokter, Crop por OD1N [CC BY-SA 3.0 (http: // criativecommons.Org/licenças/BY-SA/3.0/)], via Wikimedia Commons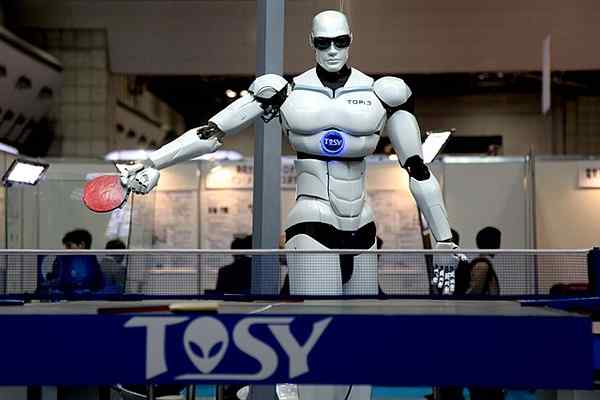 Topo, projetado para tocar Pong Pong (Tokyo International Robot Exhibition, novembro de 2009). HumanRobo [CC BY-SA 3.0 (https: // CreativeCommons.Org/licenças/BY-SA/3.0)], da Wikimedia Commons
Topo, projetado para tocar Pong Pong (Tokyo International Robot Exhibition, novembro de 2009). HumanRobo [CC BY-SA 3.0 (https: // CreativeCommons.Org/licenças/BY-SA/3.0)], da Wikimedia Commons
Referências
- (S.COMO.F.) Uma história sobre robôs. Recuperado do Instituto de Instituto.Gato
- Córdova, f. (2002) Robótica, princípio e evolução. Polbitos recuperados.Gelbukh.com